Microrobotique
La microrobotique est la branche de la robotique qui étudie la conception de dispositifs robotiques évoluant à l'échelle micrométrique ; du micromètre au millimètre.

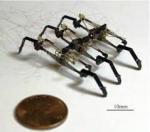
Essaim de micro-robots, produits dans le cadre d'un projet à source libre micro-robotique project. De tels essaims de micro-robots peu coûteux pourraient à l'avenir remplir certaines taches dangereuses ou dans des endroits inaccessibles
Cette discipline inclut notamment l'élaboration et la fabrication de petits robots mobiles. Le terme micorobotique est parfois aussi utilisé pour désigner la production d'éléments de robots de taille micrométrique ou des éléments logiciels capables de gérer des composants micrométriques.
Aux échelles encore plus petites, on parle de nanorobot.
Taille et définition
Le préfixe «micro» a beaucoup été utilisé pour subjectivement désigner de petits robots, mais de tailles très variables. Un projet de normalisation des noms correspondant aux échelles de taille évite la confusion. Ainsi :
- un nanorobot a des dimensions égales ou inférieures à 1 micromètre, ou permet de manipuler des composants sur la plage de 1 à 1000 nm de taille.
- Un micro-robot aurait des dimensions caractéristiques inférieure à 1 millimètre,
- un millirobot aurait des dimensions moins d'un cm (il se mesure en millimètres),
- un minirobot aurait des dimensions inférieures à 10 cm,
- un petit robot aurait des dimensions inférieures à 100 cm.
Histoire et prospective
L'origine première de la micro-robotique est peut-être à trouver chez les petits automates puis dans la science-fiction.
La microrobotique est une discipline encore très émergente, mais des micro-robots expérimentaux existent déjà.
Bien que de conception assez simple, certains peuvent déjà par exemple se déplacer sur l'eau comme les gerris ou grimper sur les murs.
Les nanocomposants et nano-moteurs qui apparaissent depuis les années 1990 semblent laisser envisager la création de nanorobots plus sophistiqués dans les années ou décennies à venir. Certains prospectives envisagent même une convergence (dite « NBIC ») des technologies de miniaturaisation, informatique, biologie et communication.
Une tendance pourrait être celle du développement de moteurs biologiques comme sources d'énergie, qui utiliseraient par exemple des bactéries comme Serratia marcescens appartenant au genre Serratia, capable de consommer de l'énergie chimique trouvée dans son environnement et utilisable pour actionner le dispositif robotique. Les biorobots pourront aussi être directement contrôlés par des stimuli tels que le chimmiotactisme ou la galvanotaxie.
Des connexion sans fil (par exemple de type Wi-Fi dans les réseaux domotiques) vont rapidement augmenter la capacité de communication des microrobots avec leur environnement, ce qui pourrait leur permettre de réaliser des tâches plus complexes et plus coordonnées.
En 2008, on arrivait à sommairement orienter et commander (par exemple pour les faire s'assembler par deux ou par quatre et à distance 2 ou 4 microrobots rudimentaires plus fins que le diamètre d'un cheveu
Conditions spécifiques au développement de la microrobotique
Le développement des microrobots implique de mieux comprendre et maîtriser certains phénomènes physiques en jeu à ces échelles, car un micro-robot est soumis à des forces qui prennent une grande importance aux échelles micrométriques et qui ne perturberaient pas un objet de taille plus importante ;
- Force de van der Waals,
- électricité statique,
- tension superficielle,
- souffle d'air,
- effets plus exacerbés et brutaux de la chaleur solaire ou du froid, de la condensation, etc.).
La microrobotique inclut l'étude des procédés de fabrication (micro-systèmes, voire nano-système, dont micro ou nanoélectronnique) nécessaires aux éléments de très petite échelle.
La biomimétique est une des disciplines qui inspire la microrobotique,
Micro-mécanique

Elle doit permettre au robot de se mouvoir et interagir avec son environnement, avec par exemple:
- Des interfaces haptiques, qui permettent au robot d'adhérer à un robot, et éventuellement de saisir des objets, de s'assembler à un autre microrobot, ou de s'ancrer à un substrat ;
- des micromoteurs permettant à des éléments mobiles de bouger suivant un ou plusieurs degrés de liberté ;
- des micro-gyroscopes ou dispositifs alternatifs remplissant des fonctions proches sont recherchés ;
- des modes de déplacements innovants ; Par exemple, comme le font des gerris, des microrobots peuvent déjà se déplacer sur l'eau en profitant de la tension superficielle de ce "substrat" liquide. On tente aussi d'imiter les ventouses des geckos, de manière à permettre à un robot de plusieurs grammes ou dizaines de grammes de marcher au plafond ou sur n'importe quel support (Programme Geckohair du Nanolab du Canergy mellonunivercity). Des étudiants travaillent à des systèmes d'adhésion s'adaptant à divers degrés de pente, permettant une marche suspendue (au plafond, sous une feuille...).
Biomimétique
Une des sources d'inspiration de la robotique est la Nature elle-même qui a testé de très nombreux mécanismes et comportements, dont certains intéressent la robotique3. Imiter le fonctionnement des réseaux de neurones et des centres nerveux et des générateurs centraux de la moelle épinière d'animaux primitifs permet déjà d'imiter certains mécanismes tels que marche, natation
, course, reptation. Les groupes de muscles sont remplacés par des cervomoteurs, mais qui sont animés en reproduisant les mouvements et le rythme de la marche, nage, reptation ou la course selon les impulsions distribuées aux microcircuits informatiques qui imitent le réseau nerveux.
L'imitation va parfois déjà plus loin encore. par exemple:
- Le Nanolab travaille à identifier et reproduire certaines molécules colloïdales très adhésives synthétisées par des animaux (escargots, limaces, certains coléoptères peuvent fortement mais provisoirement adhérer à un support grâce à de telles molécules). Il développe une instrumentation adaptée à la mesure des performances de ce type d'adhésif .
- le nanolab a produit un petit robot en forme de tank, muni de chenilles adhésives, qui peut grimper sur les murs en s'y collant ;
- Le nanolab a également développé des micro-Fibrilles Adhésives permettant une adhésion très renforcée sur un plan non horizontal, mais une performance qu'on est loin de savoir reproduire est la capacité des systèmes vivants à cicatriser, s'alimenter et se reproduire, capacités qui posent par ailleurs des questions éthiques nouvelles, qui débordent du champ habituel de la bioéthique.
- Un robot inspiré de la salamandre évolue facilement d'un milieu aquatique à terrestre8,9 ; Un poulet peut continuer à courir de manière réflexe alors qu'il a la tête coupée, ce qui montre que la colonne vertébrale et sa moelle épiniere comportent les centres moteurs essentiels.
- Des robots (salamandre ou serpent) imitent la reptation. Sur ce principe, Joseph Ayers(Northeastern University à Boston) a également développé des robots qui imitent les mouvements de la lamproie et du homard.
Risques et limites

Un des risques induits par la biomimétique est que des robots ressemblants trop à des animaux soient confondus avec leurs modèles et chassés par de vrais prédateurs.
Micro-électroniques
Les microprocesseurs permettent l'exécution de logiciels informatiques donnant son autonomie au robot. Des microprocesseurs à très faible consommation sont nécessaires pour les microrobots, car ils doivent rester légers et ne peuvent pas emporter avec eux une source importante d'énergie.
Biomécanique
Des chercheurs ont réussi à animer un robot, ou plus précisément à faire réagir le robot à des obstacles ou à la lumière grâce à des cultures de neurones de rats.
Micro- ou nano-capteurs
Ils doivent permettre au robot de se situer (ou de le situer) dans son environnement ;
Ce sont par exemple des cellules réagissant à la lumière, des capteurs de température, pression, ondes, des antennes radio, etc. voire une micro-camera.
Usages possibles
On espère qu'ils puissent accomplir automatiquement des tâches dangereuses, pénibles, répétitives ou impossibles pour les humains (dans de petits espaces, dans le vide), soit des tâches plus simples mais en les réalisant mieux que ce que ferait un être humain.
Les prospectivistes imaginent qu'ils puissent être utilisés comme
- robot industriel et technique (capable par exemple de construire de très petites pièces ou mécanismes, de diagnostiquer ou réparer l'intérieur d'une machine sans la démonter, d'inspecter une tuyauterie par l'intérieur, etc. On les imagine éventuellement capables de travailler dans le vide ou en l'absence d'air, etc.)
- robot aspirateur ou ménagers plus petits et plus discrets que ceux qui existent actuellement
- robot ludique (robots pédagogiques à programmer... Pour l'instant, ils n'existent que sous forme de jouets à l'effigie de robots, mais qui n'en sont pas eux-mêmes) ou robots pédagogiques de type BEAM (acronyme de « Biologique Électronique Esthétique et Mécanique ») sont des robots peu intelligents, sans microcontrôleur ou programme embarqué d'aucune sorte ; Un ressort ou un simple élastique peuvent être une source d'énergie mécanique pour les petits projets expérimentaux.
- robot médical ou d'assistance médicale. un micro-robot pourrait peut-être un jour opérer dans un organisme vivant.
- micro-sondes spatiales ou micro-robots à envoyer dans l'espace pour économiser le volume occupé et la charge à emporter dans l'exploration spatiale
Autonomie

Pour être autonome, le micro-robot doit disposer :
- de capteurs suffisamment efficaces (micro ou nanocapteurs)
- d'une autonomie énergétique qui nécessite des micro-piles performantes, une faible consommation d'énergie ou une capacité à trouver et exploiter une source externe d'énergie (solaire, faisceau micro-onde, source d'hydrogène alimentant sa pile à hydrogène, capacité biomimétique à extraire de l'énergie de la matière organique.. ). Un moyen d'économiser de l'énergie est de faire en sorte que les différentes fonctions d'un microrobot ne soit activées que lorsque cela est nécessaire, et de manière optimale. Le reste du temps elles sont mises en veille, ce qui ne l'empêche éventuellement pas de se déplacer de manière passive (emporté par le vent, le courant, un véhicule..)
- d'un système d' intelligence embarquée (individuelle ou collective dans le cas de robots aux fonctions complémentaires travaillant de concert, à la manière des fourmis d'une fourmillière) et/ou de communication permettant des interactions ou un pilotage à distance.
Le programme d'instructions doit être assez sophistiqué pour répondre à la survenue d'événements simples et de modifications de l'environnement (stimuli) et y répondre (individuellement ou collectivement, comme le feraient par exemple des fourmis dans une fourmilière) par réactions appropriées.















 43° 43' 23" Nord 10° 23' 48" Est
43° 43' 23" Nord 10° 23' 48" Est









